
Приложение 1-2
Скачать:
2.5. Разложение функции по главным формам колебаний
Ортогональность главных форм колебаний позволяет раскладывать произвольную функцию в ряд. Например, пусть дана функция (распределенная нагрузка) q(z,t). Представим её в виде разложения по формам колебаний:

Каждый член суммы включает произведение пока неизвестного коэффициента разложения qk(t), зависящего от времени - t, на известные функции от координат - массу и главную форму, соответствующую частоте с номером члена суммы. Вычислим коэффициенты разложения через заданную функцию. Для этого умножим обе части (2.22) на wi и проинтегри- руем полученное выражение по всей длине стержня

В правой части полученного выражения интеграл суммы заменим суммой интегралов и вынесем за знак интеграла коэффициенты разложения, не зависящие от координат. Тогда с учетом ортогональности форм (формула (2.21) из всей суммы останется только тот член, в котором k = i, то есть:

Откуда получим формулу для определения коэффициентов разложения:
С помощью δ - функции4 можно записать (2.23) и для сосредоточенных функций. При этом
Тогда коэффициент разложения (2.23) представится в виде:
Коэффициенты разложения зависят от изменения нагрузки в пространстве. Изменение их во времени совпадает с заданным. Об этом говорит то, что при их определении интегрирование проводится по пространственным координатам.
Зависимость перемещений во времени дает решение временного уравнения, которое получается при разложении перемещений по формам колебаний и разделении переменных, проводимых по процедуре подобной предыдущим выводам (см. п. 2)
откуда:
Решение временного уравнения состоит из суммы общего и частного решений:
2.6. Действие вибрационной нагрузки5
![]()
Тогда решение временного уравнения примет вид
После того, как будет взят интеграл и пронято во внимание то, что общее решение при нулевых начальных условиях и на некотором протяжении затухает, это решение упростится
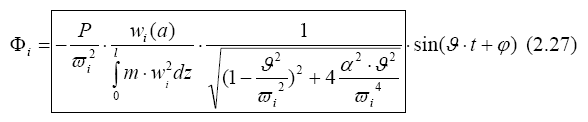
Выражение, обведенное рамкой в (2.27) не зависит от времени, и так как синус любого аргумента не может быть больше единицы, то представляет собой амплитуду колебаний. Амплитуда движения (колебания) зависит от коэффициента формы
и динамического коэффициента
зависящего от отношения частоты возмущающей силы к собственной час- тоте и коэффициента затухания - α.
Зависимость динамического коэффициента от степени затухания и отношения частот показана в табл. 2.2 и на рис. 2.3.
Как видно из графика (рис. 2.3), при малом сопротивлении движе- нию (малом затухании) и равенстве частот возмущающей силы и собст- венных колебаний амплитуда (перемещения и усилия) движения стремится к бесконечности. Это явление называют резонансом. Для строительных конструкций резонансные явления недопустимы.
Таблица 2.2
Динамический коэффициент μ при вибрационной нагрузке в зависимости
от коэффициента затухания - α и отношения частоты
возмущающей силы - ![]() к частоте собственных колебаний -
к частоте собственных колебаний - ![]()
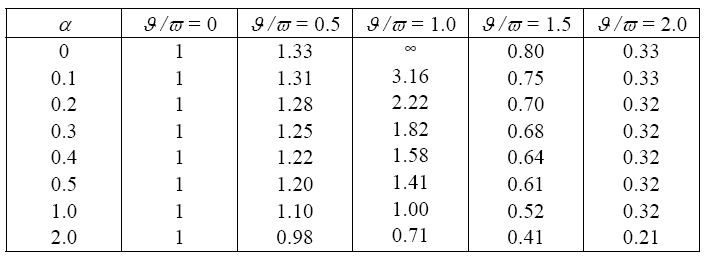
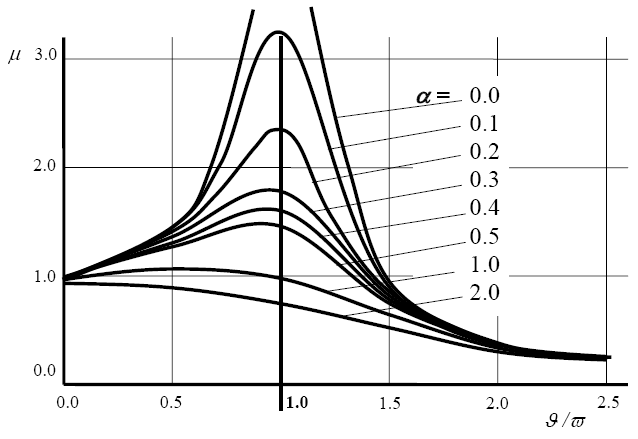
Рис.2.3. Частотные кривые при вибрационной нагрузке
2.7. Описание движения стержня с сосредоточенными массами
Часто в сооружении массы сосредоточены, например, в уровне перекрытий или покрытий зданий. Иногда приближенно заменяют распределенную массу системой сосредоточенных масс. Для таких систем имеются автоматизированные комплексы для получения частот и форм колебаний системы. Одна из таких программ для консольных стержней разработана авторами настоящего учебника6. Решение по этой программе приближенное. Но как показали математические эксперименты первые частоты и формы получаются практически точными при замене распределенной массы семью сосредоточенными по длине стержня.
Уравнения движения могут быть получены с помощью численных методов решения уравнений (2.4) и (2.8), но их можно вывести и отдельно, следуя процедуре, рассмотренной ранее.
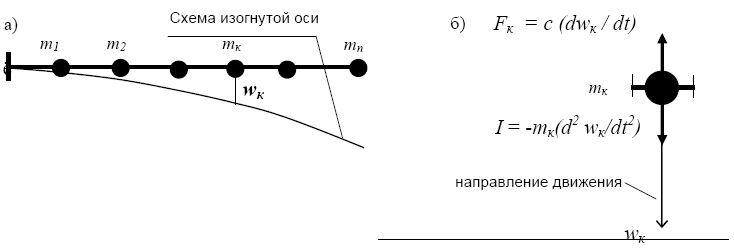
Рис. 2.4. Невесомый стержень с сосредоточенными массами (а) и силы, действующие на одну из них (б)
Рассмотрим стержень с п сосредоточенными массами (рис. 2.4). Вы- режем одну из них, например, массу к, и рассмотрим ее равновесие в инер- ционной среде. На массу действуют:
• сила сопротивления движению согласно гипотезе внутреннего трения (гипотезе Фогта) пропорциональная скорости движения и направ- лена в сторону противоположную перемещению:
Fк = с (dwк / dt), (2.28)
где с - коэффициент пропорциональности, (dwк / dt)- скорость движения, wк - перемещение, t- текущее время;
• сила инерции, которая в соответствии с принципом Д’Аламбера и известному закону Ньютона пропорциональна ускорению движения
I = -mк(d2 wк/dt2), (2.29)
где mк – величина сосредоточенной массы, d2wк/dt2 - ускорение движения
Перемещение wк массы mк с учетом сил, действующих на все массы равно:

где δki – перемещение точки к от сил, действующих на массу i.
Уравнение (2.30) для стержня с сосредоточенными массами эквивалентно уравнению (2.4) для стержня с распределенной массой.
2.8. Решение уравнения движения стержня с сосредоточенными массами
Уравнение (2.30) соответствует свободным колебаниям стержня (от- сутствуют внешние силы). Его решение, как и ранее, представим в виде разложения в ряд, в котором суммируются произведения функции wjк, за- висящей только от координаты, и Φj (t), зависящей от времени:

Если каждый член разложения (2.31) удовлетворяет уравнению (2.29), то полная сумма является его решением, то есть после подстановки произведения wjк/ ·Φj, в (2.29) получим

или после разделения переменных:
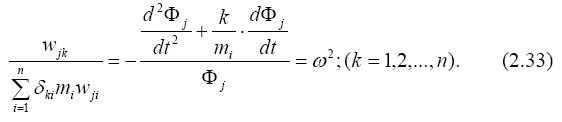
Левая часть (2.33) не зависит от времени, а правая от координаты. Равенство может сохраняться, если каждая из них - величина постоянная. Обозначим ее - ω 2. Приравняв каждую часть (2.33) постоянной величине получим два уравнения:
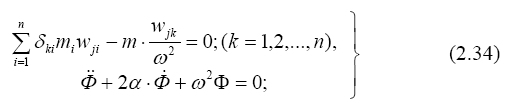
(здесь отброшен значок j, заменены производные по времени традицион-
ными обозначениями 
и введена постоянная 2α = k/mi).
Второе уравнение в (2.34) называют, как и ранее, временным уравнением. Оно имеет то же решение7 и смысл коэффициентов (рис. 2.2):
Φ = А·ехр(-α·t) ·sin( ·t+φ), (2.35)
·t+φ), (2.35)
2.9. Частоты и формы колебаний. Разложение нагрузки по формам колебаний
Первые уравнения (2.34) называют уравнениями форм колебаний или частотными уравнениями. Полученные уравнения однородные и имеют нулевое решение, если определитель системы не равен нулю. Это значит, что колебания отсутствуют, поэтому чтобы получить ненулевое решение, необходимо определитель системы приравнять нулю, то есть
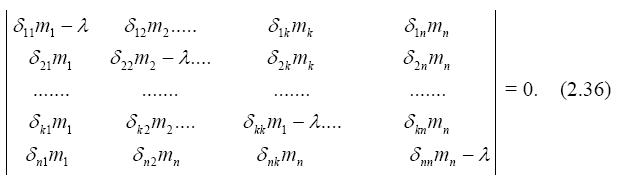
(здесь λ = 1/ω2).
В результате раскрытия определителя получим полином п – ой степени, через корни которого находятся частоты:

(здесь мы снова вернули значок j, который может принимать значения от 1 до n).
(здесь мы снова вернули значок j, который может принимать значения от 1 до n). Каждой частоте соответствует своя форма колебаний. Для того, что- бы ее получить, необходимо каждую из полученных частот подставить в систему уравнений (2.34) и решить эту систему. В результате получим перемещения всех точек сосредоточения масс системы с точностью до про- извольной постоянной величины.
Эти формы обладают свойством ортогональности, которое записывается в виде (по сравнению с условием ортогональности (2.18) только заменяется интеграл суммой):

Любая сосредоточенная внешняя нагрузка может быть разложена по формам колебаний в виде

при этом коэффициенты разложения определятся по формуле
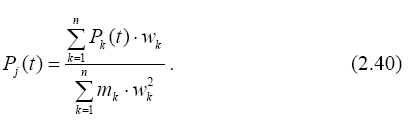
При вибрационной нагрузке в системах с сосредоточенными массами также возможен резонанс.
К списку публикаций в разделе