
Приложение 1-2
Скачать:
Глава 2. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СООРУЖЕНИЙ КОНСОЛЬНОГО ТИПА. ПРИВЕДЕНИЕ СООРУЖЕНИЙ К КОНСОЛЬНОМУ ТИПУ
2.1. Описание движения массивного стержня
Пусть дан массивный стержень (рис. 2.1), совершающий движение под действием внешней нагрузки. Рассмотрим равновесие малого элемента этого стержня длиной dz. К нему приложены: внешняя нагрузка, сила сопротивления движению F и инерционная сила I. Сила сопротивления движению, согласно гипотезе внутреннего трения (гипотезе Фойгта) пропорциональна скорости движения и направлена в сторону, противоположную перемещению:
F = с (дw / (дt)), (2.1)
где с - коэффициент пропорциональности, дw/(дt) - скорость движе- ния, w - перемещение, t - текущее время.
В эту же сторону направлена и сила инерции, которая в соответст- вии с принципом Д’Аламбера и известным законом Ньютона пропорцио- нальна ускорению движения:
I = m(д2 w/(дt2)), (2.2)
где m - масса единицы длины стержня, д2w / (дt2) - ускорение движения.
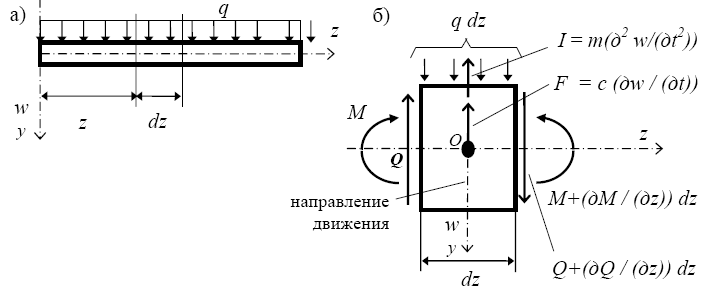
Рис. 2.1. Массивный стержень (а) и его элемент (б)
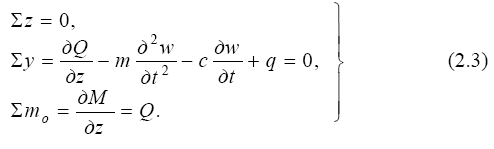
Силы, приложенные к элементу, заменяют внешнюю среду, включая и инерционную, поэтому можно рассматривать равновесие невесомого элемента в пустоте. Для плоской системы сил запишем три уравнения:
Известно геометрическое соотношение (ρ - радиус кривизны) для стержня:
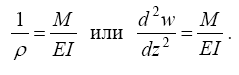
после подстановки его во второе уравнение (2.3) и несложных преобразований получим (EI = const) уравнение движения массивного стержня по- стоянного сечения:

2.2. Решение уравнения движения массивного стержня
Решение полученного уравнения (2.4) будем искать в традиционном порядке. Сначала найдем решение однородного уравнения

Это уравнение соответствует свободным колебаниям стержня (от- сутствуют внешние силы q = 0). Его решение представим в виде разложения в ряд, в котором суммируются произведения функции wi (z), зависящей только от координаты, и Φi (t) - зависящей от времени:

Если каждый член разложения (2.6) удовлетворяет уравнению (2.5), то полная сумма является его решением.
То есть, после подстановки произведения wi·Φi в (2.5) получим

или после разделения переменных:
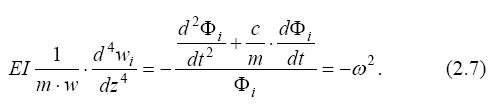
Левая часть уравнения (2.7) не зависит от времени, а правая – от координаты. Равенство может сохраняться, если каждая из них - величина постоянная. Обозначим её ω2. Приравняв каждую часть (2.7) постоянной величине, получим два уравнения:
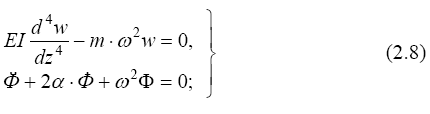
(здесь отброшен значок i, заменены производные по времени традиционными обозначениями
и введена постоянная 2α = с/m).
Второе уравнение в (2.8) называют временным уравнением. Оно имеет известное решение1 (рис. 2.2):
![]()
где А и φ - постоянные интегрирования, определяемые из начальных условий движения; А·ехр(-αt) - амплитуда колебаний, затухающая со вре- менем (при t → ∞ величина А·ехр(-αt) → 0), φ - начальная фаза движения (при t = 0 величина Φ = А·sinφ),  = ω2-α2 - круговая частота колебаний - количество колебаний в 2π секунд (количество колебаний в секунду - количество герц - равно частному от деления круговой частоты
= ω2-α2 - круговая частота колебаний - количество колебаний в 2π секунд (количество колебаний в секунду - количество герц - равно частному от деления круговой частоты  на 2π - n= = / 2π).
на 2π - n= = / 2π).
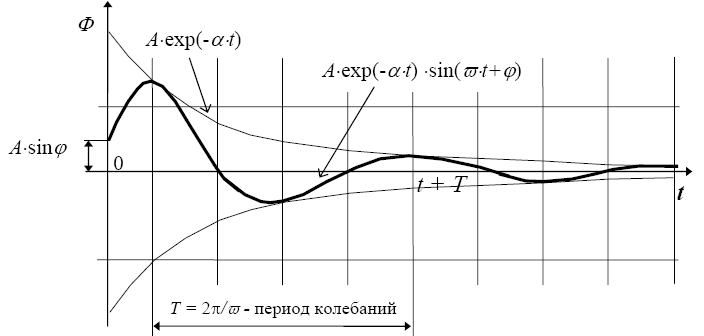
Рис. 2.2. График решения временного уравнения
2.3. Частоты и формы колебаний
Первое уравнение (2.8) называют уравнением форм колебаний или частотным уравнением. При постоянной по длине жесткости стержня и массе оно имеет решение2
w =A ch (sz) + B sh (sz) + C cos (sz) +D sin (sz), (2.10)
A, B, C, D - постоянные интегрирования, определяемые из граничных условий.
В постановке и решении конкретных задач по определению динами- ческих характеристик необходимо уметь формулировать начальные и граничные условия для стержней. На примерах покажем процедуру определе- ния динамических характеристик с использованием уже полученных ре- шений.
П р и м е р 2.1. Определить частоты и формы колебаний защем- ленного по двум концам стержня постоянного поперечного сечения дли- ной l.
Р е ш е н и е . Запишем граничные условия для уравнения (2.10):
Из этих условий получим систему четырех уравнений для определе- ния четырех постоянных A, B, C, D:
Полученные уравнения однородные и имеют нулевое решение, если определитель системы не равен нулю. Это означало бы, что колебания отсутствуют. Поэтому, чтобы получить ненулевое решение необходимо оп- ределитель системы приравнять нулю, то есть (λ = sl):
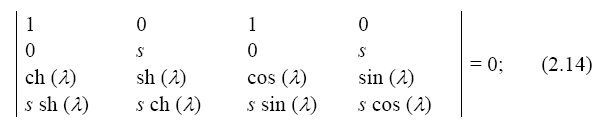
Раскроем определитель и упростим его. После раскрытия скобок и приведения подобных, получим так называемое характеристическое уравнение
- ch (λ) cos (λ) = 0, (2.15)
корни которого равны (здесь мы снова вернули значок i, который может принимать целые значения от 1 до ∞):
λi = si l = (0.5 + i)·π , (λ1 = 4.73, λ 2 = 7.85, λ 3 = 11.00 и т.д.).
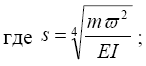
При таких значениях λ i существует ненулевое решение (2.8). Учиты- вая, что
найдем по параметру λ i частоту собственных колеба- ний:

Подставив ![]() i или λ i = si l в (2.12) найдем постоянные интегрирова- ния Ai, Bi, Ci, Di. Но так при этом определитель системы равен нулю - она имеет бесконечное множество решений. Приходится считать одну из по- стоянных известной (например, Ai =A) и выразить все остальные через нее:
i или λ i = si l в (2.12) найдем постоянные интегрирова- ния Ai, Bi, Ci, Di. Но так при этом определитель системы равен нулю - она имеет бесконечное множество решений. Приходится считать одну из по- стоянных известной (например, Ai =A) и выразить все остальные через нее:
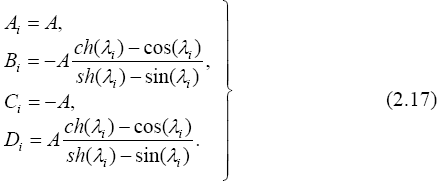
Функция прогибов, соответствующая одной из частот с учетом полу- ченных постоянных, может быть представлена в виде:

Эта функция с точностью до постоянного множителя определяет форму колебаний, соответствующую i-той частоте. Совокупность этих функций называют главными формами колебаний.
Конструкции с распределенной массой имеют бесконечный спектр частот и соответствующих им форм. В практике расчетов используются главные формы, соответствующие наиболее низким частотам. Они вносят наибольший вклад в расчетные характеристики зданий и сооружений.
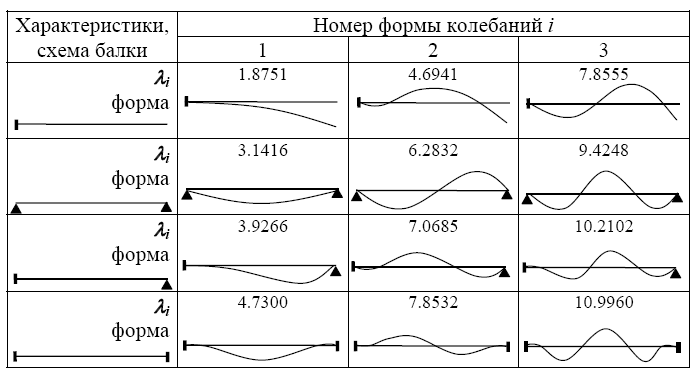
В табл. 2.1 приведены справочные данные по динамическим харак- теристикам балок с различными закреплениями.
П р и м е р 2 (для самостоятельного решения). Определить частоты и формы колебаний свободно-опертого по двум концам стержня постоянно- го поперечного сечения длиной l.
Таблица 2.1 Значения параметра λ i для определения частот собственных попе- речных колебаний простых балок по формуле
2.4. Ортогональность главных форм колебаний
Главные формы колебаний обладают замечательным свойством - ортогональностью. Докажем это свойство. Для этого обратимся к перво- му уравнению (2.8) и запишем его для двух произвольных частот и соот- ветствующих им форм колебаний:
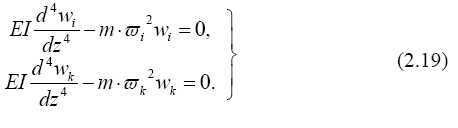
Умножив первое из них на wk, а второе на wi, вычтем второе из первого и проинтегрируем по длине стержня:

Заметим, что первый интеграл полученного уравнения (2.20) при любых граничных условиях равен нулю. Это устанавливается интегриро- ванием его по частям3:
Действительно, последний интеграл равен нулю тождественно, а первые четыре слагаемых выражают произведение усилий и перемещений по концам стержня, в котором хотя бы один из сомножителей равен нулю. В консольной балке, например, у опоры равны нулю прогиб и угол наклона (производная по z), а на конце консоли равны нулю изгибающий момент и поперечная сила (вторая и третья производные по z) .
Второй интеграл (2.20) также равен нулю в тех случаях, когда час- тоты разные по величине. И только при ![]() i =
i = ![]() k интеграл может быть не равен нулю, так как равна нулю разность частот. То есть при
k интеграл может быть не равен нулю, так как равна нулю разность частот. То есть при ![]() i ≠
i ≠ ![]() k главные формы колебаний удовлетворяют соотношению
k главные формы колебаний удовлетворяют соотношению

которое принято называть условием, или свойством ортогональности.
К списку публикаций в разделе